360度カメラで撮影した写真を任意の視点からの画像(パノラマ画像)へ変換するビューアーを作ってみようと思います。結果3回シリーズになりました。その1回目です。目次としてはこんな感じ。
1.360度写真の平面投影
2.視点の変更と背面の投影
3.視点の回転
まずは平面投影をしてみます。ちょっと前の記事で円へ投影する計算はしてみたのですが、いわゆるビューアーとはならなかったので、もう少し真面目に計算します。
THETAという360度カメラがあります。このカメラに付属するビューアーを目標に作ってみます。ちなみにTHETAを持っていなくてもダウンロードできるのでほかの360度カメラの写真も眺めることができます。ちなみにこのビューアーは入力画像の縦横の比率が1:2であればなんでも開けます。

これを真似します。基本の仕組みを考えてみます。
360度写真(正距円筒図法)
360度カメラで撮影された画像は、カメラを中心としてぐるっと1周分が1:2の縦横比の画像として記録されています。このフォーマットはいわゆる世界地図と同じように、縦に緯度、横に経度で示した形式になっています。緯度、経度の同じ角度が等間隔になるようにレイアウトされるため、左右に360度、上下に180度、結果として1:2の画像フォーマットになります。

緯度経度は地球の中心から赤道を向いて、ぐるっと一周する向きが経度、見上げる見下げる角度が緯度になります。いわゆる世界地図ですね。エクイレクタングラー(equirectangular)とかそんな呼び方するようです。
3次元座標へのマッピング
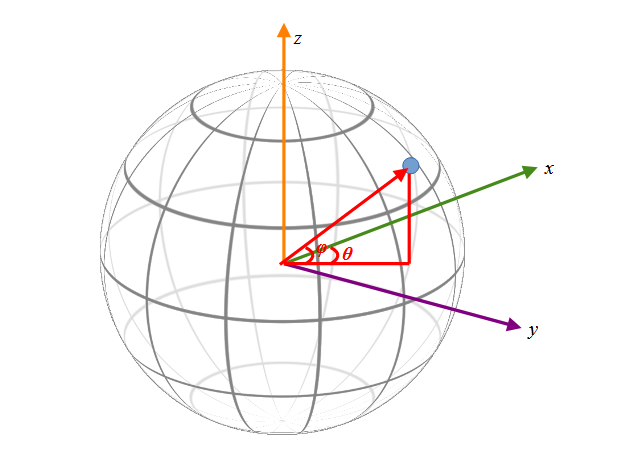
前記画像が世界地図なら、地球面へマッピングできるはずです。任意の緯度φ、経度θの座標が3次元の球体のどこへマッピングされるか考えてみます。
球の中心を原点に緯度方向にz軸をとり、経度ゼロ(グリニッジ天文台の経度)をx軸ととると、この図のように任意の点はθとφで特定できる気がします。
この図をまずはy-z平面へ投影(地球を横から投影)した時のzの値を考えてみます。
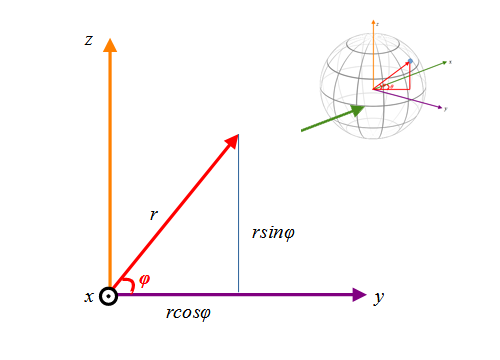
すると半径rの球はz=rsinφへ投影されます。図はちょっと正確ではないです。θ=0の時を例にした図だと思ってください。θが値を持つ場合必ずしもy=rcosφではないですが、zはどんなθでもz=rsinφです。
次にx-y平面に投影(地球を真上から投影)した時のx,yの値を考えてみます。
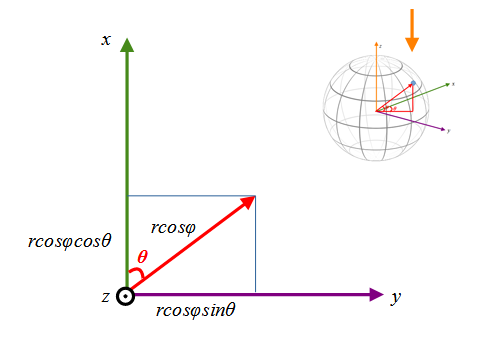
すると投影される長さはrcosφになるので、任意の緯度経度φ、θは、球の中心を原点としたx,y,z座標
$$ x = r\cos\phi\cos\theta \\
y = r\cos\phi\sin\theta \\
z = r\sin\phi$$
にマッピングされることがわかります。半径を1とするとその球面上の任意のx,y,zから、φ、θは
$$ \phi = \arcsin (z) \\
\theta = \arcsin ( \frac{y}{\cos \phi}) $$
と求まります。(x不要ですね)
視点の定義
360度写真が3次元の点にマッピングできることがわかりました。そこでこの3次元の点を、ある視点からの2次元平面の座標に再マッピングすることを考えます。
球体の内側から球の表面の写真を撮るイメージ。こんな感じ

今回視点はx軸上のある点と定義します。このx座標を\(x_1\)とします。これが視点です。
ここを視点に図中の青い長方形の2次元へのマッピングを考えます。
撮像面の定義
球の半径は1に正規化して計算することにします。
視点から像を結ぶ青い長方形を、撮像面(センサ面)と呼ぶことにします。撮像面の中心をx軸が垂直に通るように定義し、その幅は\(2w\)、高さ\(2h\)の長方形とします。
この撮像面のx座標を\(x_2\)とします。この\(x_2\)は視点\(x_1\)より大きい値(前)である必要があります。
z=0でxy平面の輪切りをするとこんな感じになります。
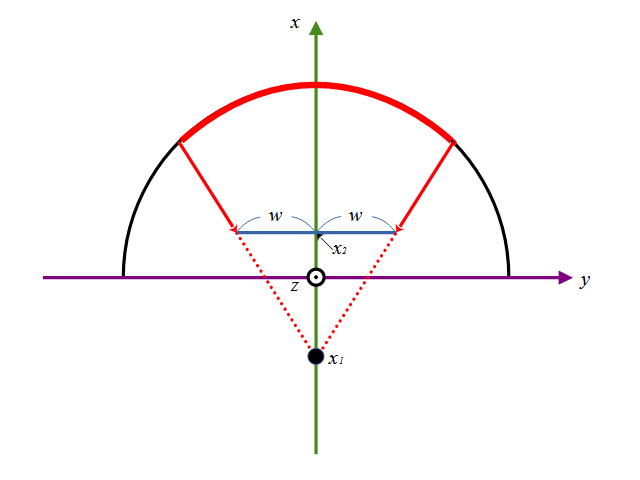
赤の曲線で示した範囲が撮像面に投影されることになります。
投影
撮像面の任意の座標\((ww,hh)\)に球のどこのxyz座標が投影されるか計算します。撮像面\((ww,hh)\)座標の3次元の座標は\((x_2,ww,hh)\)になります。
視点位置から\(ww,hh\)を通る直線の式を考えます。xy平面で考えると図のような直線\(y=a_1 x + b_1\)になります。
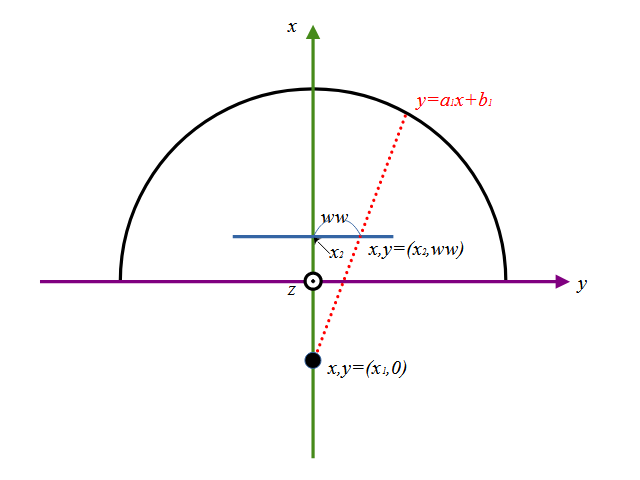
この直線は既知の2点、視点と撮像面\(x,y =(x_1,0)(x_2,ww)\)を通るので、\(a_1,b_1\)はそれぞれ
$$ a_1 = \frac{ww}{x_2 – x_1} \\
b_1 = -a_1 x_1 $$
となります。
同じようにxz平面で考えてみます。
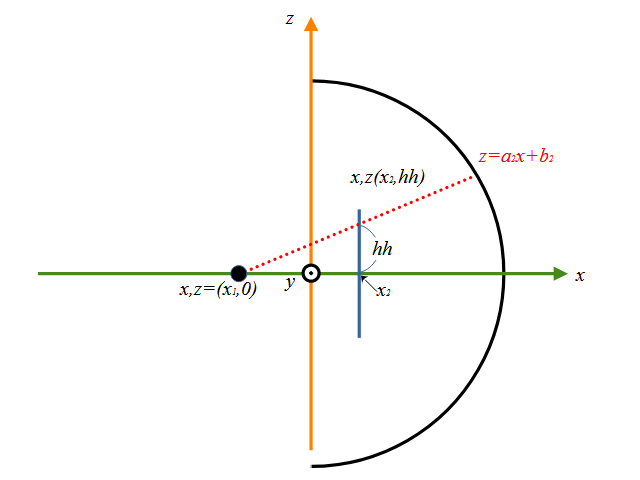
同様に直線を\(z=a_2 x + b_2\)とし、2点\(x,z = (x_1,0)(x_2,hh)\)を通るので、\(a_2,b_2)\はそれぞれ
$$ a_2 = \frac{hh}{x_2 – x_1} \\
b_2= -a_2 x_1 $$
となります。
この直線と球の交点を考えます。この球の半径は1とおいているので式は
$$ x^2+y^2+z^2=1 $$
なので、先に求めた\(a_1,a_2,b_1,b_2\)を使って
$$ x^2+(a_1 x+b_1)^2+(a_2 x+b_2)^2=1 \\
x^2 + a_1 ^2x^2+2a_1 x+b_1 ^2 + a_2 ^2x^2+2a_2 x+b_2 ^2 = 1 \\
(1+a_1 ^2+a_2 ^2)x^2 + 2(a_1 b_1 + a_2 b_2 )x + (b_21^2+b_2 ^2-1) = 0 $$
となり、\(a,b,c\)を
$$ a = 1+a_1 ^2+a_2 ^2 \\
b = 2(a_1 b_1 + a_2 b_2) \\
c = b_1 ^2 + b_2 ^2 – 1 $$
とおいて2次方程式の解の公式\(x = \frac{-b\pm\sqrt{b^2-4ac}}{2a}\)を使って解いてやるとxの値が出ます。直線と球は2点で交わるので、解は2つ求まりますが、撮像面は視点より前を前提とするので、大きい方(ルートの前がプラスの方)の解を採用します。
xが出れば先の直線の式からyとzも求まります。
$$ x = \frac{-b + \sqrt{b^2-4ac}}{2a} \\
y = a_1 x + b_1 \\
z = a_2 x + b_2 $$
Pythonで記述
Pythonで記述してみます。上の式の通りに計算式を並べただけです。使っている記号もそろえてあります。
import numpy as np
import cv2
img_w = 1920
img_h = 1080
senser_w = 0.75
senser_h = 0.75 * img_h / img_w
x1 = -1.2 # 視点の位置
x2 = 0.5 + x1 # 撮像面の位置(必ず視点より前)
w = np.linspace(-senser_w, senser_w, img_w, endpoint=False)
h = np.linspace(-senser_h, senser_h, img_h, endpoint=False)
# 配列を対称形にするためのオフセット
w = w + senser_w / img_w
h = h + senser_h / img_h
# センサの座標
ww, hh = np.meshgrid(w, h)
# 直線の式
a1 = ww / (x2 - x1)
a2 = hh / (x2 - x1)
b1 = -a1 * x1
b2 = -a2 * x1
a = 1 + a1**2 + a2**2
b = 2 * (a1 * b1 + a2 * b2)
c = b1**2 + b2**2 - 1
d = (b**2 - 4*a*c) ** (1/2)
# 球面上の3次元座標
x = (-b + d) / (2 * a)
y = a1 * x + b1
z = a2 * x + b2
# 緯度・経度へ変換
phi = np.arcsin(z)
theta = np.arcsin(y / np.cos(phi))
img = cv2.imread("src.jpg")
img_h, img_w = img.shape[:2]
# 画像座標へ正規化(座標を画素位置に戻すため0.5オフセット)
phi = (phi * img_h / np.pi + img_h / 2).astype(np.float32) - 0.5
theta = (theta * img_w / (2 * np.pi) + img_w / 2).astype(np.float32) - 0.5
out = cv2.remap(img, theta, phi, cv2.INTER_CUBIC)
cv2.imwrite("dst.jpg", out)
簡単に概要を説明します。
センサ(便宜的にそう呼ぶ)の幅と高さを出力したい解像度(画素数)の間隔でメッシュ(ww,hh)を作ります。対称形にするためのオフセットというのは、-90, -89, -88, … 88, 89, 90 と配列を作ってしまうと、画像サイズが偶数の時に、中心が0にならないため、-89.5 -88.5 … 88.5, 89.5 という形で中心が0で等間隔で並ぶようにオフセットさせています。
w = np.linspace(-senser_w, senser_w, img_w, endpoint=False)
h = np.linspace(-senser_h, senser_h, img_h, endpoint=False)
# 配列を対称形にするためのオフセット
w = w + senser_w / img_w
h = h + senser_h / img_h
# センサの座標
ww, hh = np.meshgrid(w, h)
そのメッシュの各座標と視点を通る直線が球の3次元座標(x,y,z)のどこを通るかを計算しています。先に説明した直線の式から球面の3次元座標を真面目に計算しただけです。
# 球面上の3次元座標
x = (-b + d) / (2 * a)
y = a1 * x + b1
z = a2 * x + b2
この球の座標の値がそのセンサ位置における画素値になるので、3次元座標を緯度・経度(φ、θ)へ変換して、入力画像の画素値を取得しています。
# 緯度・経度へ変換
phi = np.arcsin(z)
theta = np.arcsin(y / np.cos(phi))
これを360度写真の座標へ正規化し、remap関数を使って変換しています。座標から画素のindexに戻すために0.5オフセットします。
# 画像座標へ正規化(座標を画素位置に戻すため0.5オフセット)
phi = (phi * img_h / np.pi + img_h / 2).astype(np.float32) - 0.5
theta = (theta * img_w / (2 * np.pi) + img_w / 2).astype(np.float32) -0.5
結果
こんな感じの入力サンプルを用意しておきます。1:2のJPEG画像です。
とりあえず適当な視点位置から0.5先にある、1.5の幅の撮像面に対して投影される画像を作ってみます。

まぁこんなもんでしょう。という画像になりました。
-0.7の位置から少しずつ前進したイメージがこんな感じ。
確かに前進してるように見えます。
実写真でも試してみます。

まぁこんなもんでしょう。
まとめと今後
ひとまず何かそれらしい変換ができました。まだTHETAのビューアに比べて歪みが大きい気がするので、最適な視点や焦点距離(撮像面までの距離)を考察する必要がありそうです。
また今回単純なモデルで計算していますが、この式では球面の裏側が投影できていません。次回はそのあたりをもう少し真面目に考えて実装してみます。


コメント